Projekt wielozadaniowej hamowni napędów pojazdów podwodnych
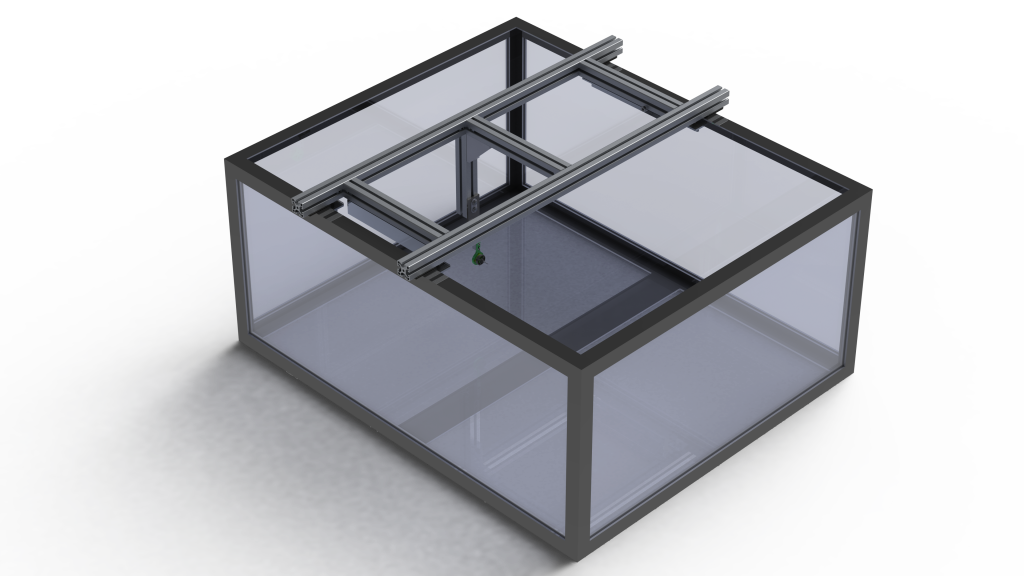
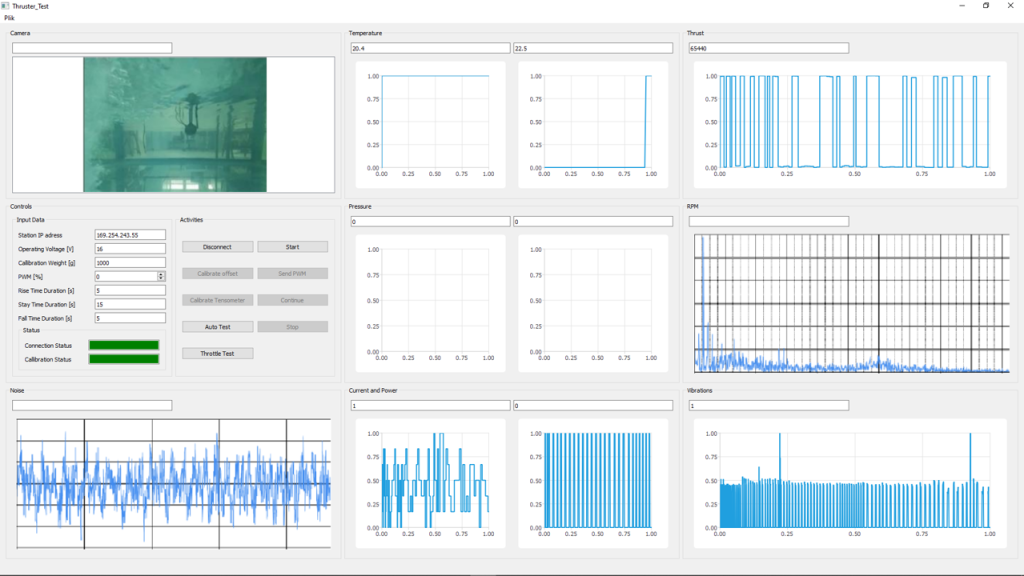
Celem projektu było stworzenie uniwersalnej platformy testowej – hamowni – do badania parametrów pędników robotów podwodnych. Przy jej konstrukcji pod uwagę wzięto między innymi możliwość powstawania kawitacji (tworzenia chmury pęcherzyków pary wodnej na powierzchni śruby napędowej) i jej wpływu na wytrzymałość systemu napędowego urządzenia, a także zanieczyszczenie hałasem środowiska podwodnego. Hamownia ta mierzy w zautomatyzowany sposób szereg wartości, które pozwalają na przebadanie konstrukcji pędnika z uwzględnieniem wielu parametrów, a następnie gromadzone dane są przesyłane i analizowane. Mierzone wartości, to między innym pobór energii, generowany ciąg, poziom i częstotliwość wibracji oraz hałasu. Rozwiązanie takie przyspiesza i automatyzuje pracę badawczą, umożliwiając natychmiastowe badania opracowanych geometrii śrub i pędników oraz pozwala na szybkie modyfikacje parametrów opisujących i sterujących pracą pędnika. Urządzenie to jest w ciągłym wykorzystaniu przy dalszych pracach Koła.
Efekty realizacji projektu zostały zaprezentowane na:
- XXIII Konferencji Studenckiego Ruchu Naukowego AGH w Bartkowej (25-27.10. 2019)
- 60. Konferencji Studenckich Kół Naukowych Pionu Górniczego (5.12.2019),
- XXIV Konferencja Studenckiego Ruchu Naukowego AGH w Bartkowej (25-27.10. 2019),
- STUKNUT’19 (26.10-02.11.2019),
- XXIII Konferencja Inżynierii Akustycznej i Biomedycznej (9-12.04.2019)