Projekt bezzałogowego, autonomicznego robota „Haller”
Projekt bezzałogowego, autonomicznego robota podwodnego „Haller” na ogólnoświatowe zawody RoboSub
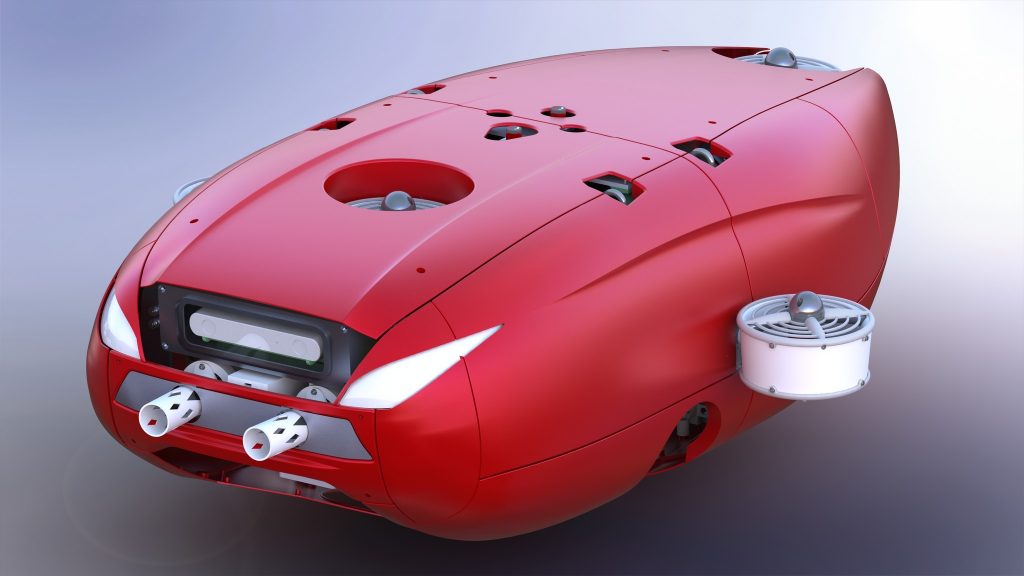
Naszym celem było stworzenie robota klasy AUV – Autonomous Underwater Vehicle – w celu zaprezentowania go na konkursie RoboSub w kategorii Explorer.
Projekt autonomicznego robota jest projektem bardzo złożonym, wymagającym poprawnej współpracy konstrukcji mechanicznej, systemu zasilania, elektronicznego, wbudowanego oraz oprogramowania, zarówno sterującego całą logiką pracy robota, jak i rozpoznającego obraz.
W projekcie robota autonomicznego „Haller” zastosowano zaawansowane urządzenia umożliwiające lokalizację robota oraz mapowanie przestrzeni:
▪DVL – Doppler Velocity Log – urządzenie służące do pomiaru prędkości pojazdów podwodnych w oparciu o efekt Dopplera
▪kamerę stereoskopową – kamerę o dwóch obiektywach umożliwiającą określanie odległości od obiektów i mapowania przestrzeni w 3D
Projekt robota oraz sam robot został zaprezentowany na wielu wydarzeniach, w tym:
▪Forum Wizja Rozwoju 2023 w Gdyni
▪Mocy Odkrywców 2023 w Rzeszowie
▪Dniu Otwartym AGH 2023
▪Targach Organizacji Studenckich AGH 2022 i 2023
▪27. Konferencji Studenckiego Ruchu Naukowego AGH Bartkowa 2023