Realizowane projekty
Koło Naukowe AGH Marines zrealizowało do tej pory szereg projektów, a kolejne są ciągle opracowywane i wykonywane. W swoim portfolio mamy hamownię i roboty podwodne typu ROV i AUV.
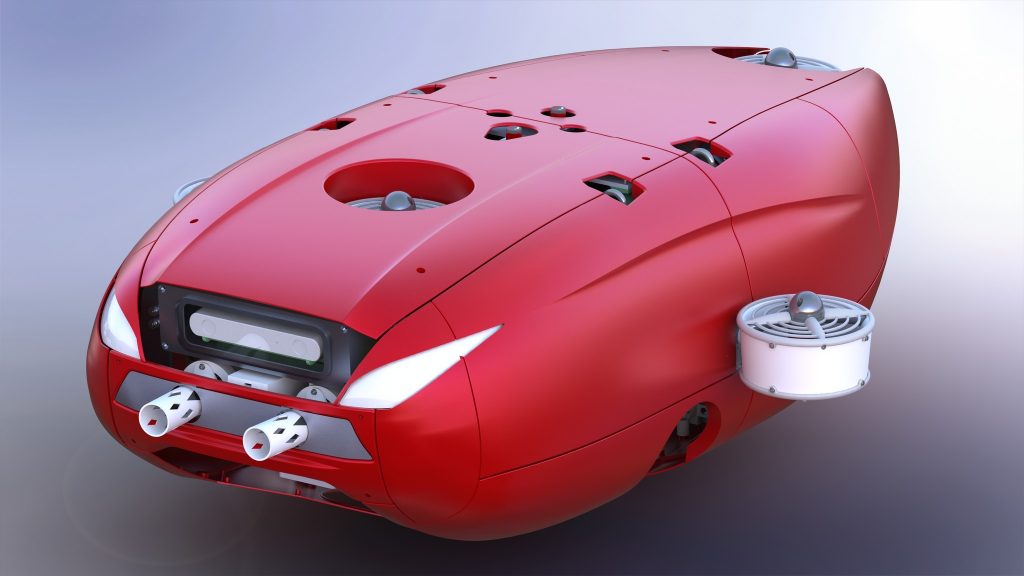
Projekt bezzałogowego, zdalnie sterowanego robota podwodnego „Narwhal”
Naszym najnowszym projektem jest ROV „Narwhal”, który zaprezentowany zostanie na zawodach MATE ROV 2024 w Kingsport, USA. Czytaj więcej.

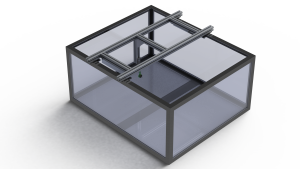
Projekt wielozadaniowej hamowni napędów pojazdów podwodnych
Celem tego projektu było stworzenie uniwersalnej platformy testowej – hamowni – do badania parametrów pędników robotów podwodnych. Czytaj więcej.
Projekt bezzałogowego, zdalnie sterowanego robota podwodnego „Gupik”
Naszym celem było stworzenie robota klasy mini-ROV – Remotely Operated underwater Vehicle. Czytaj więcej.

Projekt bezzałogowego, autonomicznego robota podwodnego „Haller”
Kolejnym projektem było stworzenie innego robota niż poprzednio, bo klasy AUV – Autonomous Underwater Vehicle. Czytaj więcej.